Радиолокационные данные в географических исследованиях и картографировании |
||||||||||||||||||||||||||||||||||||||||||||
|
Рассматриваемые вопросы:
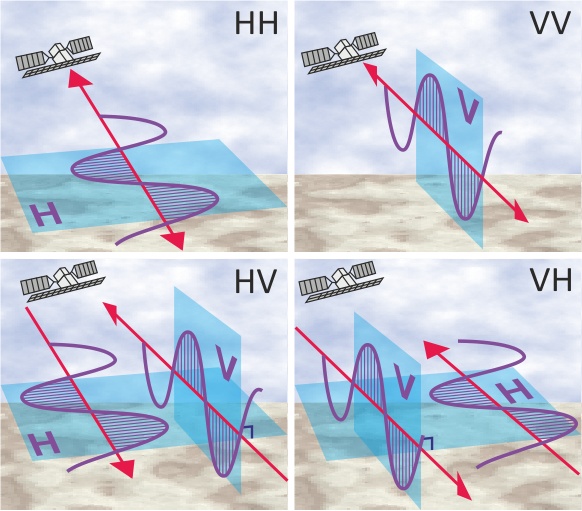
Что такое радиолокационная съёмка? Радиолокационная съёмка - вид аэрокосмической съёмки, осуществляемой радиолокатором - активным микроволновым датчиком, способным излучать и принимать отражённые от земной поверхности поляризованные радиоволны в определённом диапазоне длин волн (частот). То есть на радиолокационных снимках яркостью закодировано количество отраженного излучения, но не солнечного, как на привычных для нас снимках в видимом диапазоне, а излучения, создаваемого радиолокатором.Длина и частота радиоволн при съёмке земной поверхности Авиационная и космическая радиолокационная съёмка осуществляется в миллиметровом, сантиметровом и дециметровом диапазонах длин волн (λ). Наряду с длиной волны используют понятие частоты (ν). Обе эти величины пропорциональны скорости света в вакууме: c=λν. Для обозначения диапазонов съёмки применяют специальные латинские буквосочетания.
Радиоволны способны проникать сквозь облака, что
позволяет получать радиолокационные изображения вне
зависимости от погодных условий.

Проникающая способность радиоволн
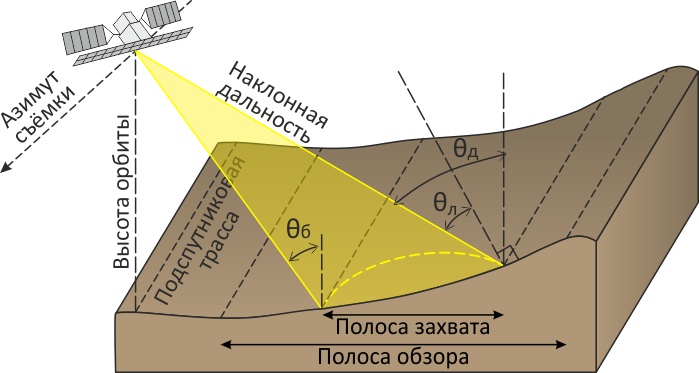
Геометрия радиолокационной съёмки
В процессе полёта спутника по орбите (направление движения носителя радиолокационной системы называют азимутом съёмки) антенна на его борту излучает радиоволны в направлении земной поверхности под углом к ней (направление излучения называют дальностью). Радиолокационное изображение формируется путём регистрации отраженного поверхностью (обратного) сигнала по наклонной дальности (этим термином принято называть расстояние от антенны до поверхности). Съёмку непосредственно под носителем (в надир) не проводят, так как в этом случае дальности различаются незначительно, обратные сигналы от близких объектов местности возвращаются к радиолокатору почти одновременно и на снимке эти объекты неразличимы. Углом съёмки обычно называют угол падения θ (в англоязычной литературе принято использовать термин incidence angle) – это угол между направлением посылаемого радиосигнала и отвесной линией, проведенной через точку, в которую направлен сигнал. Участки снимаемой местности, наименее удалённые от надира, называют ближней зоной, а наиболее удалённые - дальней зоной. Соответствующие им углы падения - θб и θд. В случае наклона зондируемой поверхности выделяют локальный угол падения θл – угол между направлением радиоволны и нормалью к склону. Угол падения волны для современных космических радиолокационных систем может варьировать в больших пределах:
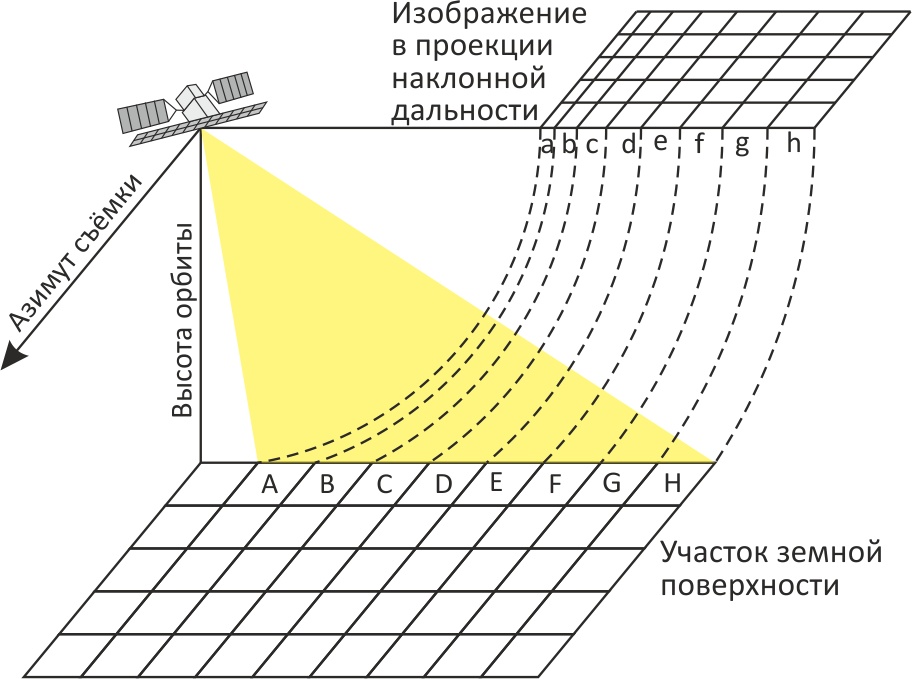
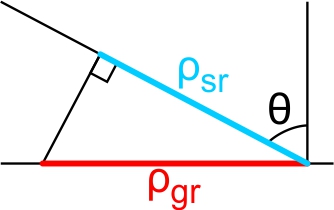
Если исходные радиолокационные изображения представлены в проекции наклонной дальности, то объекты, расположенные ближе к радиолокатору, будут выглядеть более сжатыми по сравнению с объектами, расположенными дальше от него. Для правильного отображения местности изображение из проекции наклонной дальности пересчитывают в проекцию наземной дальности. Пространственное разрешение радиолокационных изображений определяется свойствами антенны и различается в направлении действия антенны (дальности) и в направлении движения спутника (азимута). Разрешение по наклонной дальности ρsr (в направлении, перпендикулярном направлению полёта) пропорционально длительности импульса: чем короче импульс, тем выше разрешение. Оно вычисляется по формуле ρsr=τc/2, где τ - длительность импульса, c - скорость света в вакууме.
Пространственное разрешение радиолокационных изображений по азимуту ρa легко определяется для радиолокаторов бокового обзора (РБО) по формуле ρa=Srdλ/L, где Srd - наклонная дальность до поверхности, λ – длина волны, L – горизонтальный размер реальной антенны. Для таких систем возможности повышения пространственного разрешения ограничиваются размерами антенны. Так, для космических РБО, осуществляющих зондирование в X-диапазоне (λ≈3 см), при размере реальной антенны 10 метров и наклонной дальности в несколько сотен километров разрешение по азимуту будет составлять около 2 км.
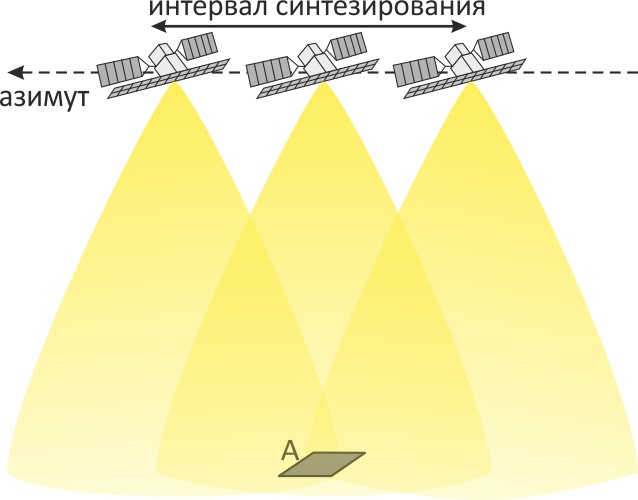
В настоящее время вся радиолокационная съёмка Земли из космоса осуществляется радиолокаторами с синтезированной апертурой. Радиолокационная съёмка Земли ведётся при разных режимах обзора местности: широкозахватном (ScanSAR), маршрутном (StripMap) и прожекторном (SpotLight). Эти режимы отличаются технологией получения изображений, их пространственным охватом и разрешением. При широкозахватном режиме широкую полосу захвата получают путём последовательного переключения импульса в направлении съёмки. В этом режиме полоса захвата может достигать сотен километров, однако пространственное разрешение низкое - десятки и сотни метров. При маршрутном режиме съёмка осуществляется в пределах одной полосы, ширина которой достигает десятков километров. Пространственное разрешение в этом случае достигает нескольких метров. При прожекторном режиме обзора в процессе движения спутника луч антенны многократно направляют в центр снимаемого участка. При этом режиме получают минимальный пространственный охват, но наивысшее пространственное разрешение - до долей метра). 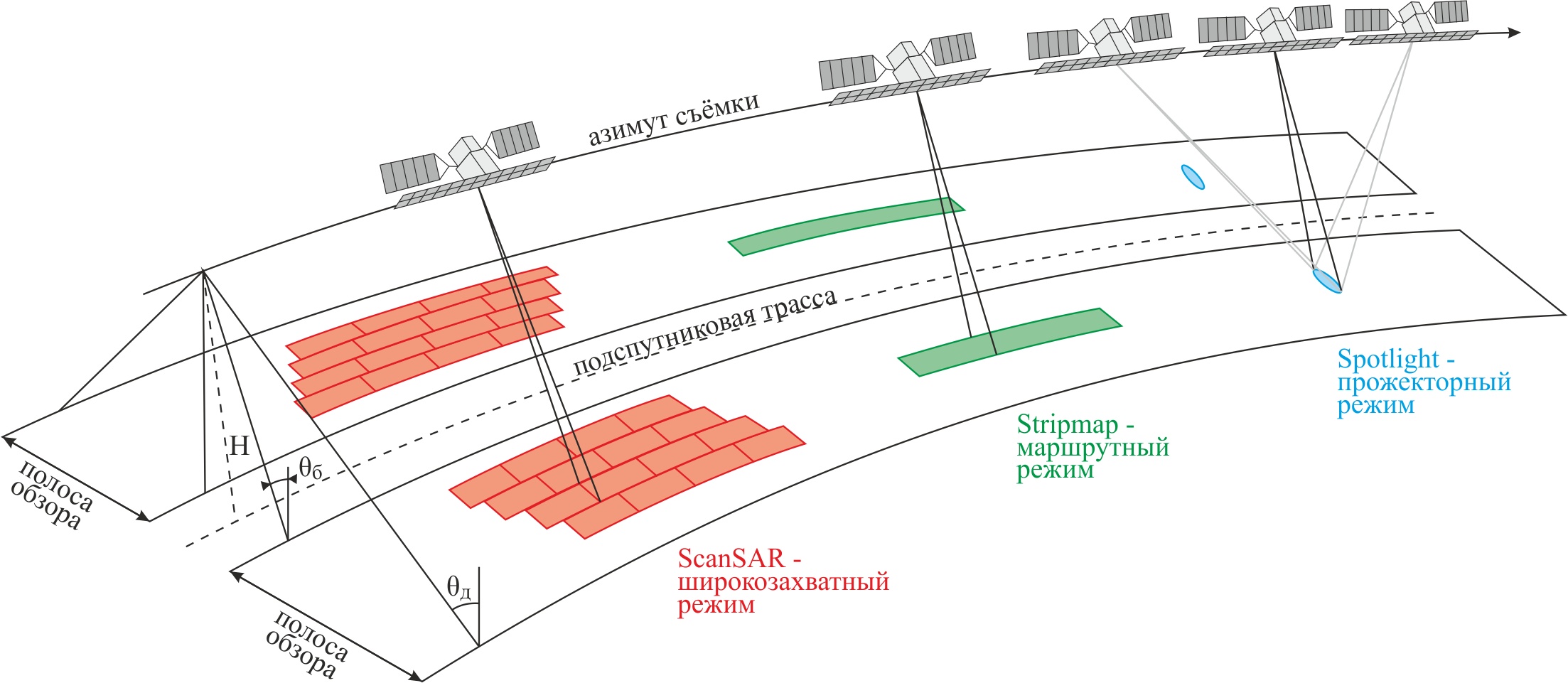
Режимы обзора космических радиолокаторов с синтезированной апертурой
Многочастотный режим: получение радиолокационных снимков одновременно при разных длинах радиоволн. Такая съемка из космоса в настоящее время не ведется. Уникальной в своём роде можно назвать систему SIR-C/X-SAR, которая вела съёмку одновременно в трёх диапазонах: X, C и L. В ближайшей перспективе (2019-2021 гг.) планируется создание нескольких многочастотных систем радиолокационного наблюдения Земли: канадская OptiSAR (диапазоны X и L), индийско-американская NISAR (S, L). Интерферометрический режим: повторные радиолокационные съёмки одного и того же участка местности при соблюдении следующих условий: 1) зондирование идентичной аппаратурой при одинаковых параметрах, 2) зондирование с близко расположенных точек орбиты, расстояние между которыми называется интерферометрической базой. Выделяют продольную, поперечную и временную интерферометрические базы, которые характеризуют взаимное положение радиолокаторов во времени и пространстве. Разные виды интерферометрической базы используются для решения разных задач: продольная - для выявления движущихся объектов, поперечная - для построения цифровых моделей рельефа, временная - для выявления изменений объектов, смещений земной поверхности. 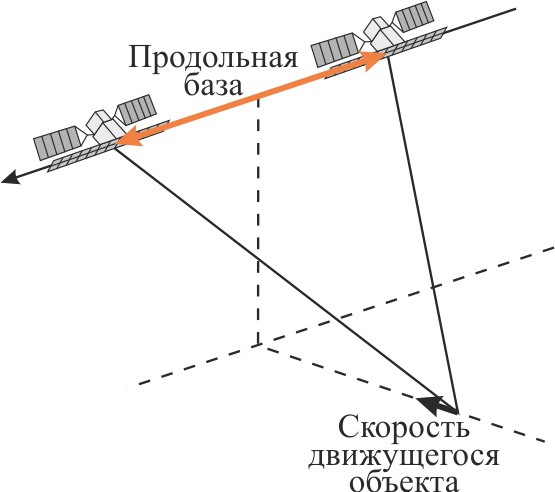 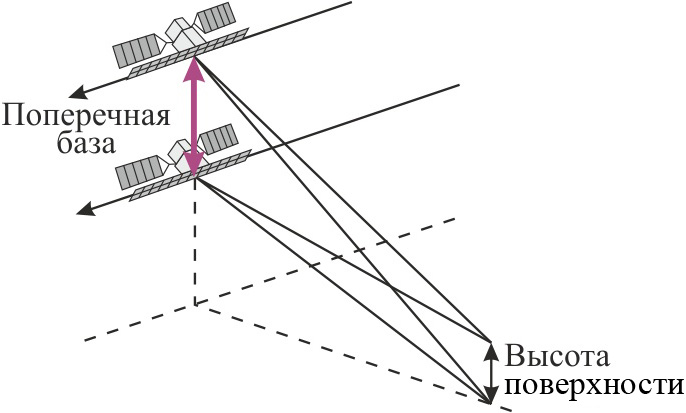
Виды интерферометрической базы Повторность съёмки одной и той же территории при интерферометрическом режиме реализуется разными путями: 1) синхронно, когда на летательном аппарате установлены два радиолокатора, разнесенных на некоторое расстояние, один из которых работает и на излучение, и на приём сигнала, а второй - только на приём (интерферометрия с "жёсткой" базой) (пример такой съёмки - Shuttle Radar Topography Mission) 2) в режиме "тандем" - двумя идентичными радиолокаторами при движении космических аппаратов-носителей по близко расположенным параллельным орбитам (одна из разновидностей интерферометрии с "мягкой" базой) (например, TerraSAR-X/TanDEM-X) 3) последовательно - первая съёмка выполняется в момент времени t, последующие съёмки - с этого же спутника (или аналогичного) на повторном витке орбиты через интервал времени Δt, кратный периоду повторения трассы полёта (иногда такой вариант съёмки также называют интерферометрией с "мягкой" базой) (например, повторная съёмка со спутника Radarsat-2 возможна с интервалом в 24 дня, со спутника ALOS-2 - 14 дней). 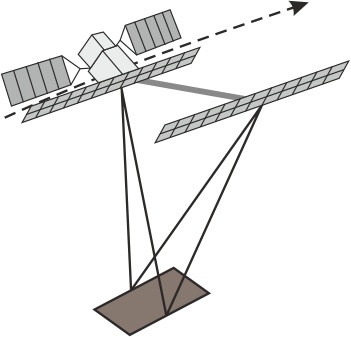 2 2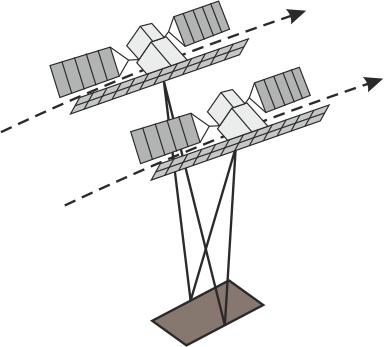 3 3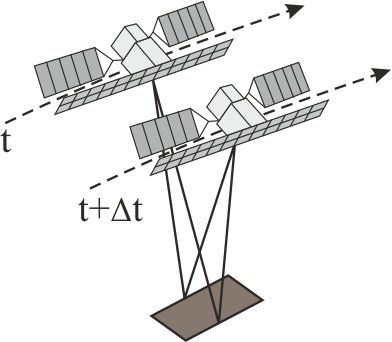
Варианты проведения интерферометрических съёмок В последнее время в целом наблюдается тенденция к увеличению количества съёмочных режимов, в которых ведётся работа космических радиолокаторов. Так, системой Radarsat-1 осуществлялась съёмка в 7, а Radarsat-2 – уже в 17 режимах, характеризующихся комбинацией следующих параметров: пространственное разрешение, ширина полосы захвата, диапазон углов съёмки и набор поляризационных каналов. |
|||||||||||||||||||||||||||||||||||||||||||
| © 2017 г. Балдина Е.А., Трошко К.А., лаборатория аэрокосмических методов, Географический факультет МГУ имени М.В. Ломоносова | ||||||||||||||||||||||||||||||||||||||||||||